随着工业智造的快速发展,传感器技术作为…
2026年1月19日,中国·深圳 近日,我司与加…
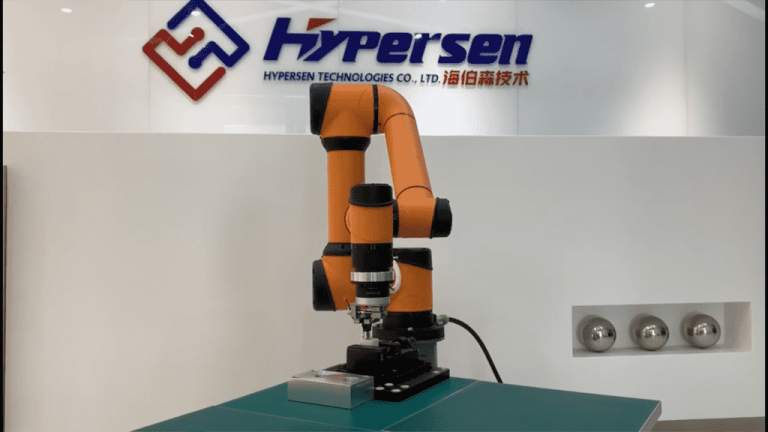
在精密装配线上,机器人能以毫米级的精度…
面阵固态激光雷达的“发家史” 激光雷达通常…
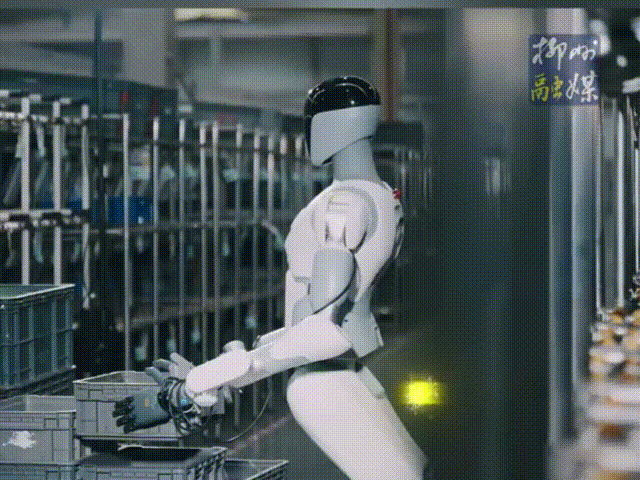
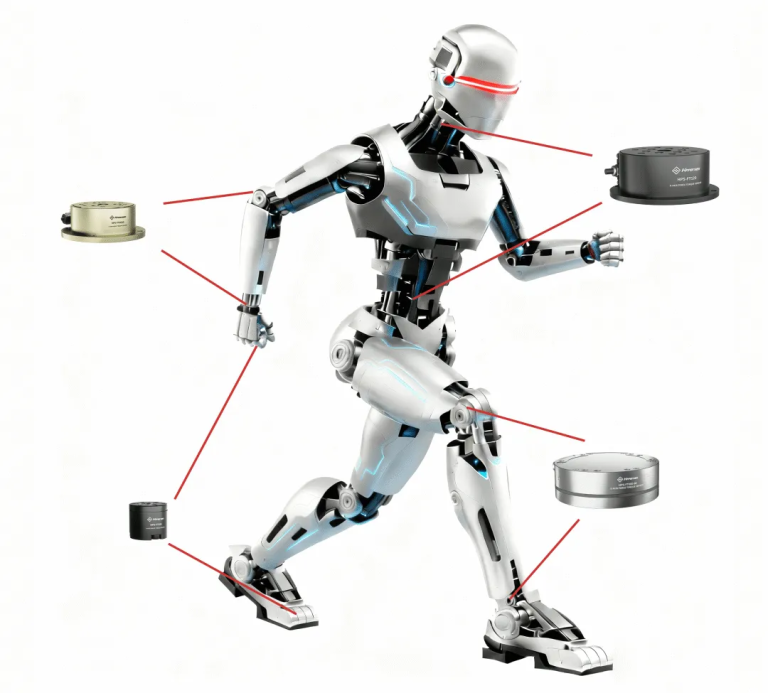
在人形机器人从概念走向现实的关键征程中…
在智能制造浪潮的推动下,对生产过程中瞬…
1.前言 在高端智能制造领域,如精密装配和…
六维力传感器作为机器人实现力觉感知与智…
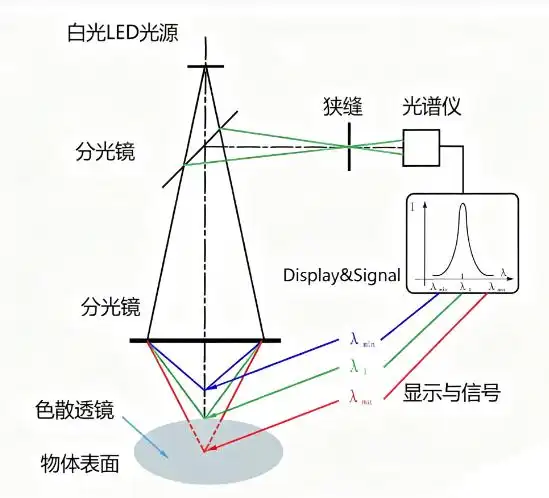
在工业检测领域,对物体表面三维形貌进行…